Overview
This is a complete software-hardware project. The core goal was to build a wireless control system consisting of a handheld remote and an onboard boat receiver.
My role
- Served as team lead, main programmer, and hardware designer.
- Independently completed software and hardware development and debugging for the remote controller and receiver.
Technical implementation
- Implemented SPI, ADC, PWM, and related drivers based on STM32F103C8T6 and HAL.
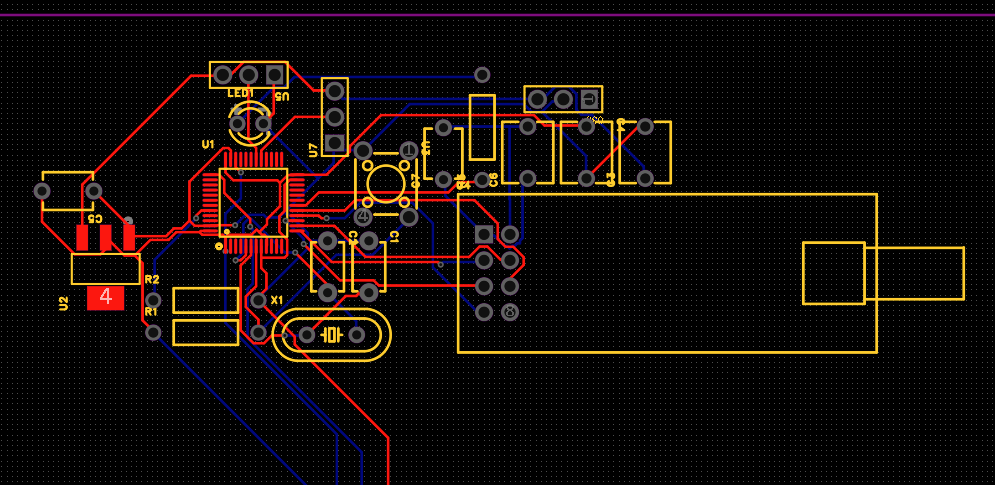
- Designed the PCB with JLC EDA and completed soldering.
- Optimized power ripple and joystick jitter with parallel capacitors and software filtering.
- Completed input sampling, PWM mapping, and a version that could operate on water.
Screenshots and Engineering Details
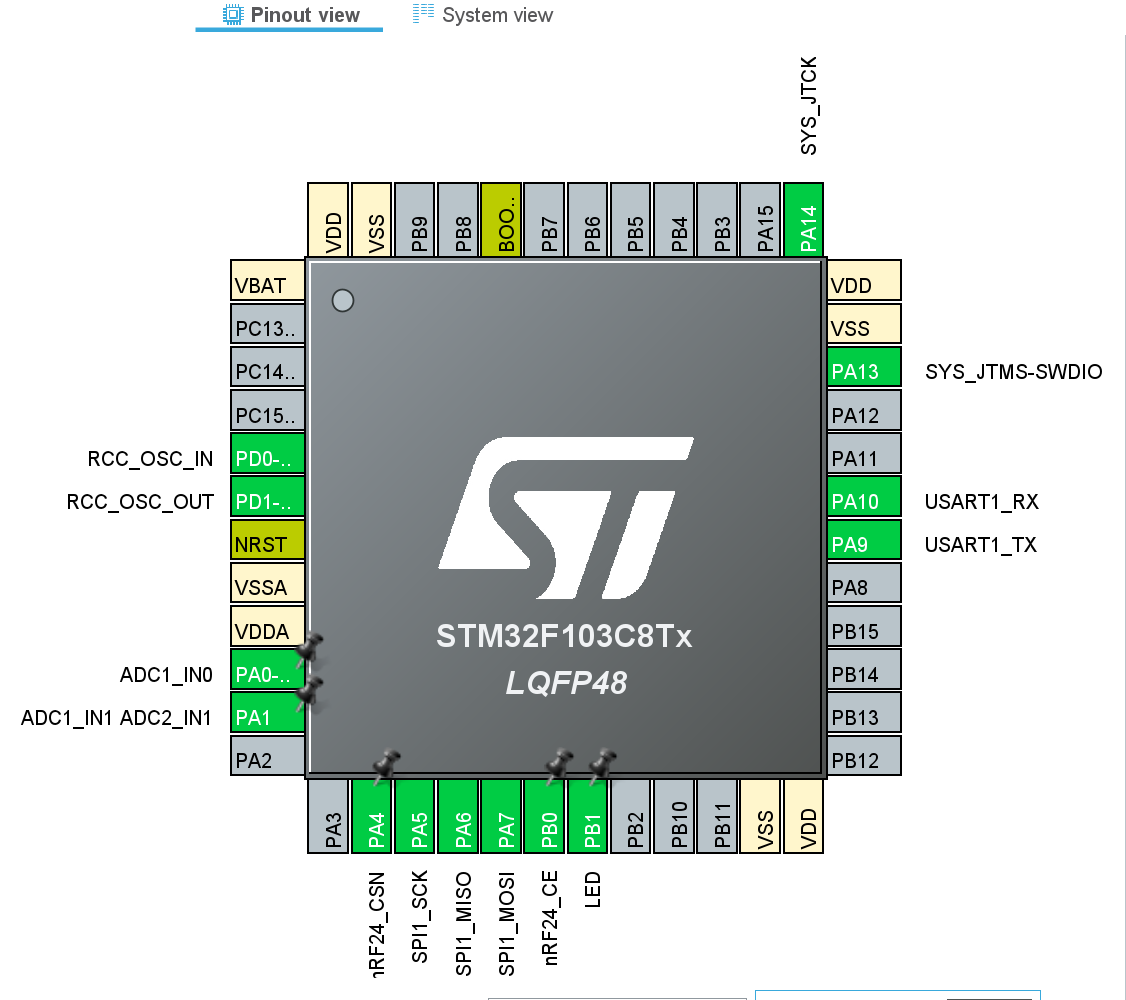
The pinout is built around the STM32F103C8T6, including ADC input, SPI communication, USART debugging, and basic GPIO output.
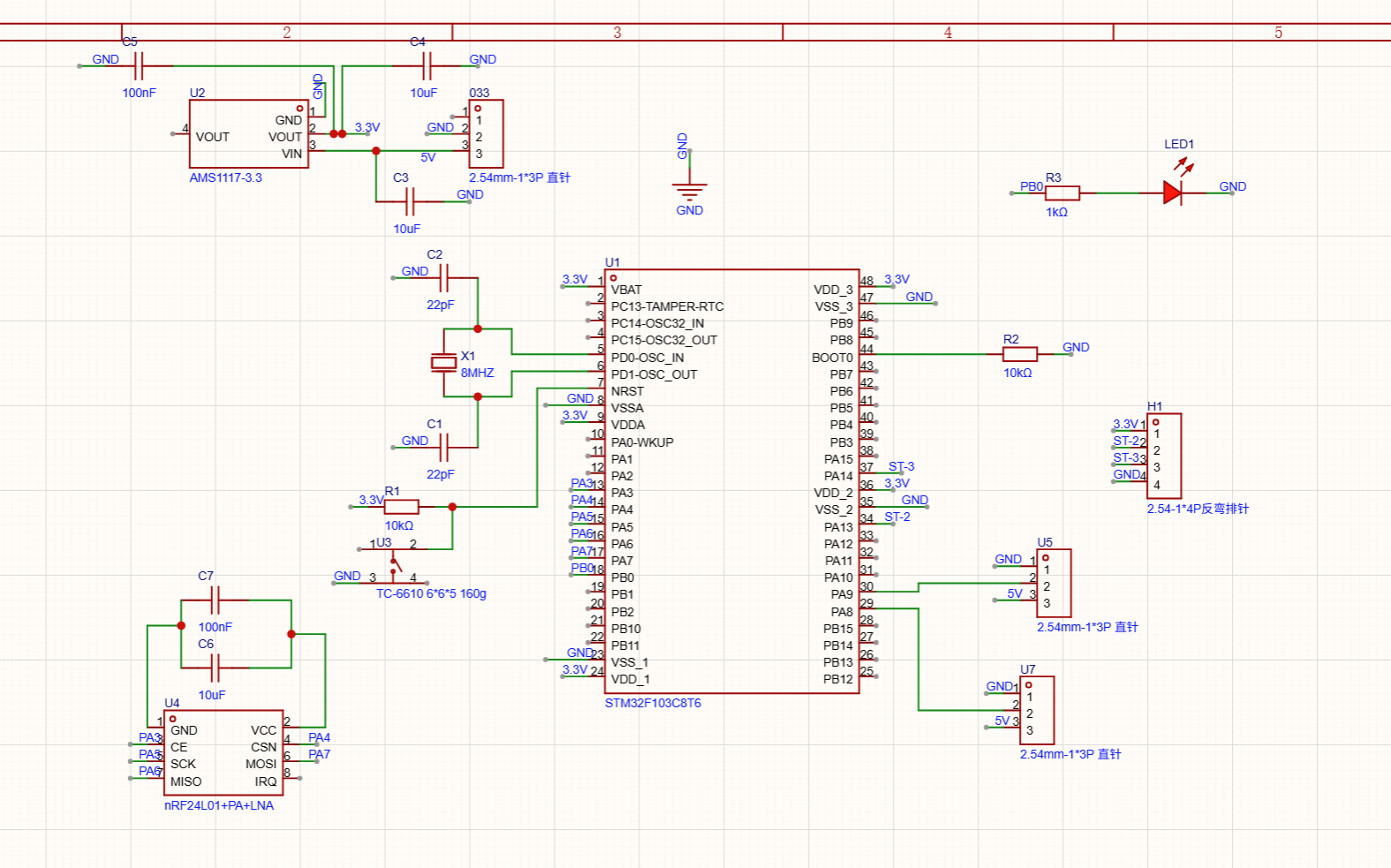
The schematic includes 3.3V regulation, power filtering, crystal oscillator, nRF24L01 communication module, status LED, and external connectors.
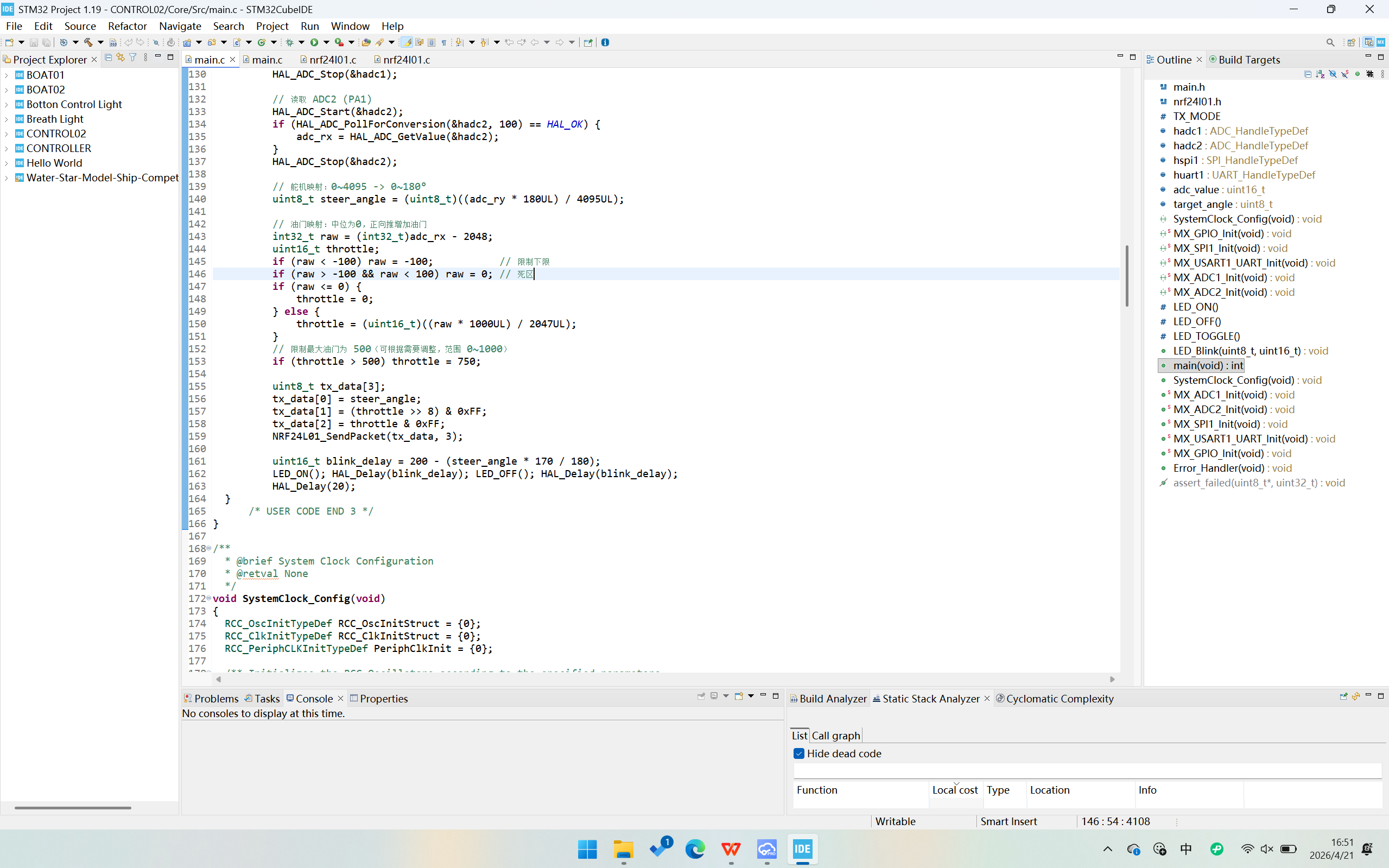
The code side handles ADC sampling, throttle and steering mapping, nRF24L01 data transmission, and LED feedback, forming the control chain from remote input to onboard actuation.
Result
- Became one of the few teams to finish the race and reached the final stage.